Abstract
Specialty crop production is labor-intensive. Rising labor costs and uncertainty regarding labor availability are threatening the financial viability of many agricultural producers in the United States. In response, stakeholders are searching for alternatives to labor-intensive production systems, thus driving technological innovation. This article aims to review current technological developments at the forefront of specialty crop production. We specifically review recent literature in the past decade to highlight trends in technology advancement based on the category and functionality of the technology and discuss the economic impact and limitations of these technologies.
1. Introduction
The 2004 Farm Bill defines specialty crops as âfruits and vegetables, tree nuts, dried fruits, horticulture, and nursery crops (including floriculture)â (USDA-AMS, n.d.). The U.S. specialty crop industry, with a total market value of $84.2 billion in 2017, accounted for 15.5% of U.S. agricultural production by value (USDA-NASS, 2022). Nationwide, more than 242 000 farms contribute to the production of fruits, vegetables, nuts or nursery crops. California is the leading specialty crop producer by value, with state receipts of fruits and nuts approximately $19 billion in 2022, followed by Washington, with approximately $3 billion, and Florida, with approximately $1 billion (USDA-ERS, 2022). Notably, the supply of nuts has experienced the most significant growth, with production more than doubling from 2.61 pounds to 5.78 pounds per capita from 2000 to 2020 (USDA-ERS, 2020).
The specialty crop sector is particularly labor-intensive as it requires substantial manual labor from planting to harvest (Castillo et al., 2021; Guan et al., 2015; Roka and Guan, 2018). It is reported that at least 20â25% of vegetable production and 40-45% of fruit production in the U.S. is dependent on hand harvesting during the late 90s (Sarig et al., 2000). Despite advancements in technology, much of todayâs specialty crop production still depends heavily on manual labor for tasks such as picking, sorting, and packaging (Astill et al., 2020). Labor costs make up a significant portion of production expenses. On average, labor costs account for 38% of production expenses for fruit and tree nut farms and 29% for vegetable and melon farms (Calvin et al., 2022). A notable example is Florida strawberry production, where labor costs account for nearly 40% of total operating expenses (Guan et al., 2020).
Hand harvesting of specialty crops has become increasingly more costly due to a shrinking agricultural labor force in the U.S. (Gongal et al., 2015). The declining trend in the agricultural labor force can be attributed to various factors, such as the aging workforce in agriculture, availability of alternative jobs in non-agricultural sectors, and tightening immigration policy. As a result, there has been a substantial increase in farm labor costs. According to USDA reports, farm wages have seen a 16% annual increase from 2000 to 2019, which is in stark contrast to the 5% increase in nonfarm wage rates over the same period (Calvin et al., 2022).
Given these challenges, the U.S. agriculture industry has found itself increasingly reliant on foreign-born workers to fill the gap (Guan et al., 2015). According to the National Agricultural Workers Survey (NAWS), the majority (70%) of the agricultural labor force is foreign-born, and 44% of those interviewed in 2019-2020 were unauthorized (U.S. Department of Labor, 2022). However, relying heavily on a migrant workforce poses challenges for the long-term sustainability of the industry due to the uncertainty caused by changes in immigration policy. Changes in immigration policy can disrupt the availability of foreign-born workers, leading to labor shortages, and thus affect the production of specialty crops (Huang et al., 2024).
These labor challenges are threatening the livelihood of specialty crop producers, but also driving technological innovation (Charlton et al., 2019). In response, the USDA has made significant investments in automation and precision agriculture, including funding research and partnerships to develop mechanical and âsmartâ technologies for harvesting and crop management (Astill et al., 2020). Driven by these efforts, agricultural production is undergoing a transformative shift towards greater mechanization and precision. This includes advancements in many parts of the production system including tractors, sprayers, conveyers, platforms, mechanical harvesters for cultivation, weeding, transportation, and harvesting. Processing fruits and vegetables benefited significantly from such developments. For example, mechanization transformed the California processing tomato industry in the 1960s (Calvin et al., 2022). Truck shakers are another successful R&D innovation widely adopted in fruit and nut production, with recent advances in sensing and machine vision further enhancing automation efficiency (Whitney, 2018; Zhang et al., 2021; Homayouni, 2021).
This paper aims to systematically review the latest advancements in automated robotics, remote sensing, and machine learning systems, and their transformative impact on the specialty crop industry. These categories were selected due to their critical role in addressing key challenges within the sector, such as labor shortages and the demand for precision agriculture. Robotics addresses labor-intensive tasks such as harvesting, remote sensing provides real-time monitoring of crop health and environmental factors, and machine learning systems enable the analysis of vast amounts of data, improving decision-making.
Previous literature has typically focused on one of these three technologies. Bac et al. (2014) and Defterli et al. (2016) reviewed robotics in fruit farming, concluding that while robotic harvesters show promise, they currently lack the dexterity, perception, and speed of human workers. Gongal et al. (2015) and Jafarbiglu and Pourreza (2022) explored the role of sensors in fruit detection and nut crop monitoring. Machine learning applications, as reviewed by Isingizwe and Opara (2020), Sharma et al. (2021) and Sahu et al. (2022), emphasize the use of predictive models and defect detection methods in fruit and vegetable systems, while also addressing implementation challenges.
This paper summarizes these three technologies â robotics, remote sensing, and machine learning â into a comprehensive review across fruit, vegetable, and nut crop farming, identifying research gaps, and providing insights to guide future research efforts. Specifically, the focus will be on exploring technologies like unmanned aviation vehicles used for targeted spraying, automated robotics deployed for tasks such as harvesting and pruning, and the use of satellite-based remote sensing for efficient crop management. These technologies play an instrumental role in the evolution of precision agriculture, which capitalizes on interpreted data to make data-driven management decisions, thereby enhancing productivity and labor efficiency. We categorize these technologies as: robotics, remote sensing, and machine learning systems. We focus on the technologies developed for crop harvesting, pest and disease control, yield prediction, nutrition, and water management in fruit, vegetable, and tree nut production, and discuss how these advancements improve efficiency and precision in farm operations. We further discuss their potential economic impact, current adoption levels, and roadblocks for the successful implementation of these technologies.
2. Materials and methods
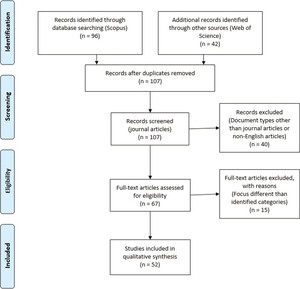
This article follows the PRISMA systematic review framework, as outlined by Liberati et al. (2009), which involves three key phases: identification, screening, and eligibility. We also perform a keyword co-occurrence analysis in the screening process to map current research areas and uncover gaps in the existing literature.
2.1 Identification
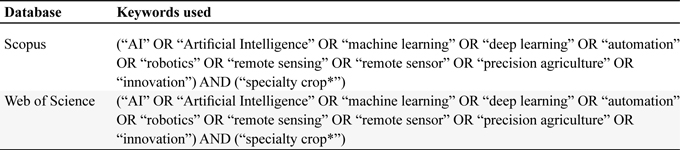
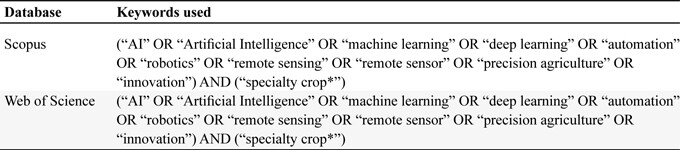
To gain a comprehensive understanding of the advancements in the domain of specialty crop management, this paper conducted a systematic review of journal articles published in English-language journals since 2012. Research articles were sourced from reputable academic databases, namely Web of Science and Scopus. Google Scholar is also used for performing manual searching for full-text articles. The search strategy employed a combination of keywords that are listed in Table 1.

Search query.
Citation: International Food and Agribusiness Management Review 28, 2 (2025) ; 10.22434/ifamr1104
2.2 Screening and keyword co-occurrence analysis
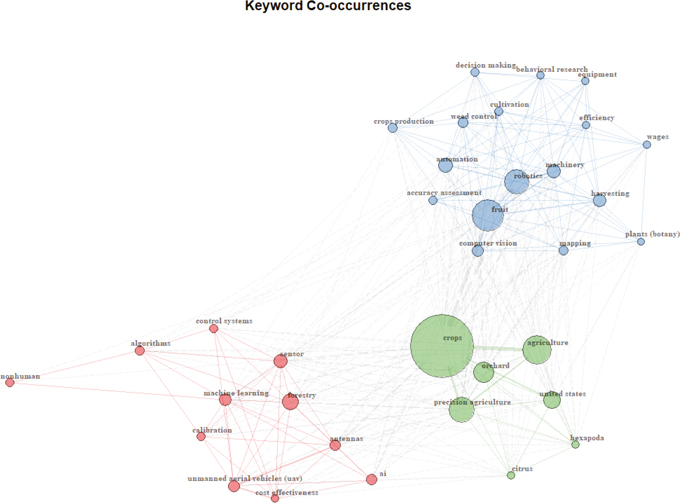
After removing duplicates from the initial search, 107 papers were retained for keyword co-occurrence network analysis using the âbibliometrixâ package in R. This method identifies the strength of association between keywords based on how frequently they appear together within the same document, revealing patterns of research focus. Figure 1 offers a visualization of the top 35 co-occurring keywords, with terms standardized to avoid duplication (e.g., ârobotsâ changed to âroboticsâ). The Fruchterman-Reingold algorithm was used to generate the network map, grouping keywords into three distinct clusters based on the frequency and strength of their connections. Tightly connected keywords form clusters representing areas of intense research activity.
Keyword co-occurrence network analysis.
Citation: International Food and Agribusiness Management Review 28, 2 (2025) ; 10.22434/ifamr1104
The first cluster reveals a significant interrelation with keywords such as âfruit,â ârobotics,â âmachinery,â âautomation,â and âharvesting.â This correlation aligns with the understanding that harvesting represents one of pressing needs that can be improved by automated systems. Further, stemming from âharvestingâ, two words stand out that are âwagesâ and âefficiencyâ. These relationships reveal that studies have focused on their development recognizing the influence from rising wages and how automated systems could improve efficiency in specialty crop production. Consequently, this paper reviews a significant portion of innovations that can substantially alleviate the labor demands in the process of harvesting.
The second cluster demonstrates a frequent co-occurrence with terms like âmachine learning,â âforestry,â âcalibration,â âsensor,â and âcontrol systems,â etc. A notable insight from this cluster is the regular association of these technologies with the keyword âcost-effective.â This suggests a prevailing theme that technological interventions in precision agriculture are not only enhancing accuracy but are also cost-efficient.
The final cluster centered around âcropsâ include âagriculture, â âorchards,â âprecision agricultureâ, âcitrus, â âUnited States,â etc. This indicates a concentration of academic studies in precision technologies, particularly in the context of orchard production in the United States. Many studies that are included in this review targeted remote sensing in orchard production.
These clusters guide the structure of this review, highlighting three key themes: robotics focused on improving harvesting efficiency, sensing technologies and machine learning systems that enhance precision agriculture, and a crop-specific focus on fruit, orchard, and citrus production. This network analysis not only identified key research areas but also provided insights into existing research gaps, which are discussed further in the reviewâs later sections.
2.3 Eligibility
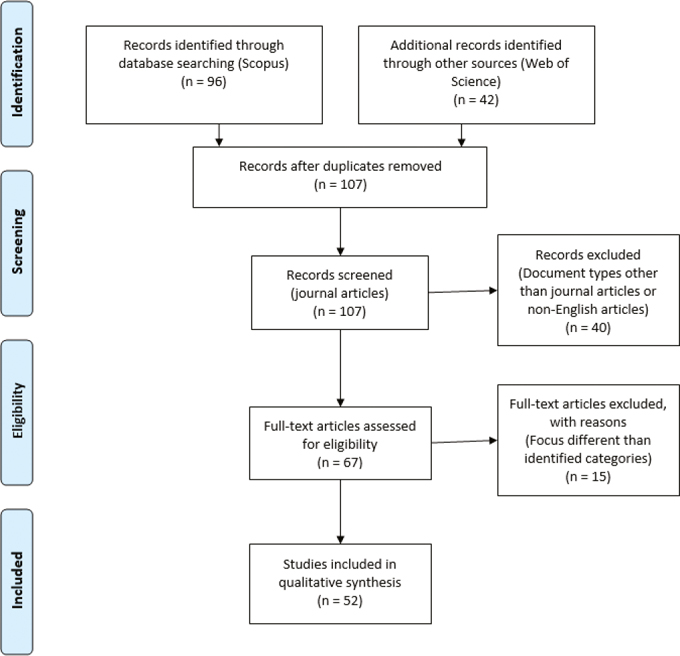
After a careful filtering process, a subset of 52 studies were selected to offer a detailed exposition of the latest trends and developments in robotics, remote sensing, and machine learning systems in specialty crop management. The screening process is depicted in Figure 2. In the screening step, only English-language journal articles were retained for full-text analysis. Next, in the eligibility step, we excluded 15 more publications that do not focus on the development or application of robotics, remote sensing, or machine learning systems. The majority of these articles examined the economic feasibility and adoption of available technologies, which is a topic we return to later when discussing in the economic impact and challenges of mechanization and automation in Section 4.
Flow diagram. Source: PRISMA 2009 flow diagram.
Citation: International Food and Agribusiness Management Review 28, 2 (2025) ; 10.22434/ifamr1104
3. Results and discussion
We analyze the subset of 52 articles, categorizing each by its technological function and the specific crop(s) it targets. Our exploration begins with innovations in robotics, emphasizing the technological advancements in automation that tackle labor-intensive tasks, such as harvesting and weed control. This area highlights how automation is set to revolutionize efficiency and precision in farm operations. We then transition to the rapidly advancing field of remote sensing research, which plays a crucial role in monitoring and managing crop health, water status, and nutrition from a distance. These advancements are instrumental in enhancing sustainable farming practices by providing detailed insights into crop conditions without the need for physical presence. Finally, we turn our attention to machine learning systems. This segment underscores the integration of machine learning algorithms in decision-making processes, illustrating the transformative potential these technologies hold for the future of agriculture.
3.1 Robotics
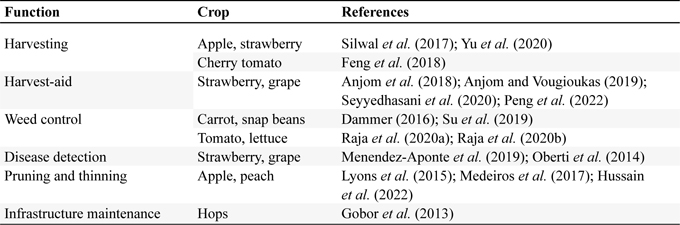
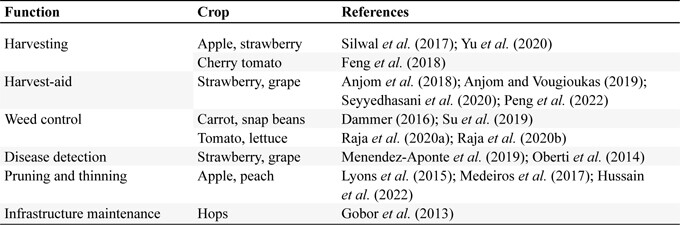
Robotics can be categorized by their designed functions: harvesting, harvest-aid, weed control, disease detection, etc. Currently, there are semi-autonomous and autonomous robots on the market for specialty crop production. Seventeen studies on robotics for specialty crop production published in the recent decade are summarized in Table 2, categorized by the main functionality and the crop they are designed for.
Articles on robotics in specialty crop production.
Citation: International Food and Agribusiness Management Review 28, 2 (2025) ; 10.22434/ifamr1104
Harvesting, such as picking, is typically the most labor-intensive task in fresh produce production. Therefore, there have been numerous studies on automation in harvesting fresh fruits and vegetables. The main task of harvesting robotics is to pick mature fruit without causing significant damage (Yu et al., 2020). Automation of these fruit-picking robots mainly involves three components: recognition, picking, and moving (Kitamura and Oka, 2005).
Yu et al. (2020) proposed a ridge-planting strawberry harvesting robot that used a fruit pose estimator called Rotated YOLO (R-YOLO), significantly improving the localization precision of the picking points. The model improved the efficiency of strawberry recognition by using a faster and more lightweight image analysis tool, enabling the system to recognize strawberries with a success rate of 94.43%. Silwal et al. (2017) presented apple robotic harvesters guided by machine vision algorithms, enhancing precision during the picking process. Feng et al. (2018) introduced a robotic harvesting system for cherry tomatoes that consists of three parts: a railroad vehicle, a visual unit and an end-effector that can hold and separate. These advancements in robotics and automation aim to reduce labor demands, increase harvesting speed, and ensure higher consistency in product quality.
In addition to the fully autonomous harvesters, harvesting-aid robots have also been studied and developed to increase workersâ efficiency. Designs often target reducing the transportation time of fully packed trays from workers during harvest. These harvest-aid robots have been applied to strawberry and table grape production (Peng et al., 2022; Seyyedhasani et al., 2020b). Seyyedhasani et al. (2020a) conducted simulations of harvest-aid robots in strawberry production and found work efficiency during morning and afternoon shifts increased from 81.8% and 78.2% to 92% and 86.5%, respectively. Anjom et al. (2018) formulated a linear mixed model to forecast the picking time during strawberry harvesting. Subsequently, mechanistic models were designed and integrated into the scheduling process for harvest-aid robots to optimize their use in the field, ensuring more efficient harvesting operations (Anjom et al., 2019).
Automation of weed control mainly involves two components: detection and control (Raja et al., 2019). Detection requires differentiating between the crop and weed, which often involves computer vision techniques (Raja al., 2020). Classification algorithms are then designed and incorporated for weeding robots (Su et al., 2019). The control mechanism involves mechanical removal or chemical control of weeds. Some examples include tilling and cutting (McCool et al., 2018; Pérez-Ruiz et al., 2012; Raja et al., 2020), and precision spraying (Dammer, 2016; Raja et al., 2020).
Automated disease detection systems can improve scouting efficiency. Menendez-Aponte et al., (2019) tested a strawberry field robot under different terrain settings to improve scouting efficiency. Oberti et al. (2014) advanced the automated detection sensitivity of powdery mildew on grapevine leaves. Other robots are designed for grape vine (Botterill et al., 2017) and apple tree pruning (Medeiros et al., 2017), thinning (Lyons et al., 2015; Hussain et al., 2022), and supporting trellis structures (Gobor et al., 2013).
3.2 Remote sensing
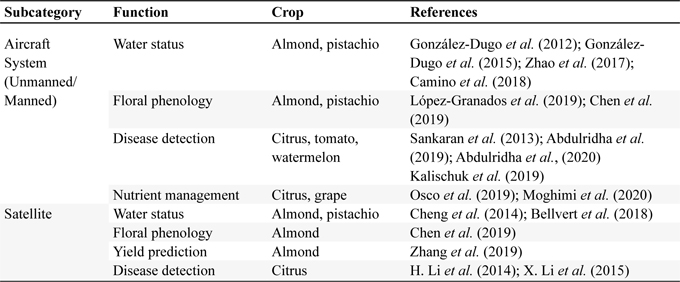
Two main platforms that employ sensing devices to conduct remote information acquisition are examined: aircraft systems and satellites (Jafarbiglu and Pourreza, 2022). Eighteen studies on remote sensing for specialty crop production published in the recent decade are summarized in Table 3. These technologies are frequently used in nut and citrus production for monitoring water status, scouting for pests and diseases, phenotyping, yield predictions, and a variety of other purposes.
Articles on remote sensing in specialty crop production.
Citation: International Food and Agribusiness Management Review 28, 2 (2025) ; 10.22434/ifamr1104
Aircraft systems include unmanned aerial systems (UAS) and manned aircraft systems. Camino et al. (2018) examined the use of high-resolution thermal imagery acquired by manned aircraft in orchard management. The research evaluated how variations in plant health indicators, such as chlorophyll levels and water stress, change within the tree canopy of an almond orchard under different irrigation conditions. However, most aerial mapping has been overtaken by UAS over manned aircrafts in recent studies.
A UAS is an aircraft that is remotely controlled by a pilot or has the capability of flying autonomously. Compared to manned aircraft, it has many advantages including the capability of flying lower to ground, utilizing incident light sensors for image calibration, and generating canopy height models (Hunt and Daughtry, 2018). Additionally, the relative costs of UAS are lower (Keating et al., 2022). Gonzalez-Dugo et al. (2012) used UAS to obtain high-resolution imagery for monitoring the relationship between intra-crown temperature variability with water stress severity in almond trees. In another study of almond farming, Zhao et al. (2017) utilized high-resolution imagery obtained from UAS to predict Stem Water Potential (SWP) in different growing stages. The system was also used to monitor water status in a pistachio farm (Gonzalez-Dugo et al., 2015). López-Granados et al. (2019) and Chen et al. (2019) employed UAS to monitor almond flowering status. UAS have been used for disease detection such as Huanglongbing (citrus greening) (Sankaran et al., 2013), citrus canker disease (Abdulridha et al., 2019), and tomato spot diseases (Abdulridha et al., 2020). UAS can be also used to assess disease severity and improvements in watermelon production (Kalischuk et al., 2019). UAS have been used to aid in precision nutrient management in citrus (Osco et al., 2019) and table grape production (Moghimi et al., 2020).
Satellite remote sensing has increased with the advancement of satellites and imagery processing technologies. Satellites have the advantage of mapping a vast area in a cost-efficient way, but image quality is highly dependent on the atmospheric conditions (Chen et al., 2019). Image processing techniques as well as machine learning algorithms are often combined with satellite remote sensing to detect water status in nut crops (Bellvert et al., 2018; Cheng et al., 2014), and measure floral phenology (Chen et al., 2019). Zhang et al. (2019) used satellite remote sensing to obtain information about orchard growth and weather conditions. These data were combined with machine learning techniques to predict almond yields. Satellite imaging has been effective in disease detection as it can quickly detect infected trees across a large area. Multiple studies (H. Li et al., 2014; X. Li et al., 2015) have utilized satellite-acquired aerial multispectral images to detect HLB (citrus greening).
3.3 Machine learning systems
Machine learning systems are often incorporated in the design of robotic and remote sensing technologies for navigation and recognition. These systems consist of more advanced machine learning methods, such as artificial neural networks (ANN) (Kurtulmus et al., 2014), convolutional neural networks (CNN) (Marzougui et al., 2020; Partel et al., 2019; M. Zhang et al., 2020), classification and regression trees (CART) (Zheng et al., 2009), and partial least squares regression (PLS-R) (Herrmann et al., 2020). Each of these methods is suited to specific tasks, integrating both quantitative data analysis (e.g., yield prediction) and image detection (e.g., characteristic identification), providing versatile solutions for agricultural applications. Artificial neural networks are often utilized for recognizing patterns. Convolutional neural networks are specialized for image recognition by analyzing visual data in layers. Classification and regression trees make predictions or classifications, which is ideal for decision-making tasks. Partial least squares regression is a statistical method that handles highly complex datasets by identifying key relationships between variables, often used to predict crop traits and yields. These deep learning systems have the capability of providing solutions from handling quantitative and qualitative data simultaneously (Pantazi et al., 2016).
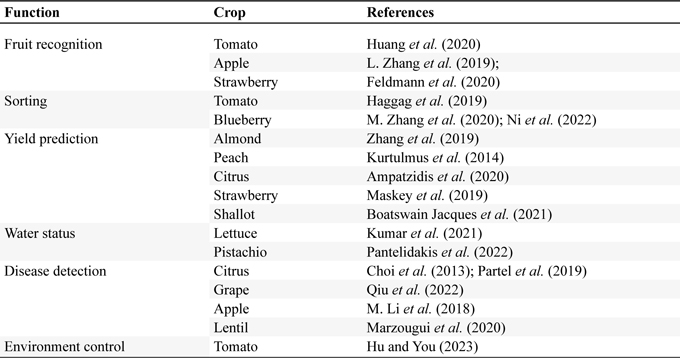
Nineteen studies on machine learning systems for specialty crop production published in the recent decade are summarized in Table 4, categorized by the main functionality and the crop they are designed for.
Articles on machine learning systems in specialty crop production.
Citation: International Food and Agribusiness Management Review 28, 2 (2025) ; 10.22434/ifamr1104
Recent machine learning advancements in fruit and vegetable production have resulted in new techniques to improve measurement precision, speed, along with overall yield. Huang et al. (2020) proposed a Fuzzy Mask R-CNN model for automatic identification of ripeness levels of cherry tomatoes. The model used a method to detect the edges of the tomatoes and analyzed their color to predict ripeness, achieving a detection accuracy of 98% with high precision. Similarly, a multi-task cascaded convolutional network-based method was used for intelligent fruit detection to improve detector performance and demonstrating excellent accuracy and time-cost performance (L. Zhang et al., 2019). Machine learning systems are used to detect and classify strawberries by their shapes (Feldmann et al., 2020).
An intelligent hybrid experimental-based deep learning algorithm using a combination of CNN, ANN, and other techniques was developed for tomato-sorting controllers. The hybrid CNN-ANN-based control algorithm produced a theoretical classification performance of 100% for all classes, demonstrating potential for improving the classification accuracy of similar fruit and vegetable sorting machines (Haggag et al., 2019). Convolutional networks were employed for hyper-spectral image segmentation to detect and predict bruising in blueberries (Ni et al., 2022; M. Zhang et al., 2020). An average precision of 98% was achieved for the berry detection model, highlighting the methodâs accuracy (Ni et al., 2022). These machine learning algorithms are often coupled with uniform illumination for automatic sorting and grading apples and other fruits (Lu and Lu, n.d.).
Additional classification applications include using machine learning models to detect water-stressed crops. Kumar et al. (2020) applied neural network and Random Forest (RF) to classify water-stressed lettuce. Pantelidakis et al. (2022) measured the water stress index of pistachio trees by identifying sunlit leaves using convolutional neural networks.
Accurate yield prediction is important in precision crop management. Kurtulmus et al. (2014) applied the ANN classification system to detect immature peach fruits and predict yield. Zhang et al. (2019) applied the stochastic gradient boosting model to predict early-season and mid-season yields for almond nutrient management. Ampatzidis et al. (2020) applied a cloud and machine learning based application Agroview to evaluate and classify characteristics of citrus trees. Maskey et al. (2019) forecasted strawberry yields under different weather conditions using a machine learning technique, specifically the single layer neural network. Boatswain Jacques et al. (2021) designed a vision-based yield monitor to count and map shallots during the harvesting process.
Another important application of machine learning in specialty crop production is scouting and disease detection. Partel et al. (2019) developed a deep learning based CNN for monitoring Asian citrus psyllid (ACP), which helped automate scouting procedures in citrus production. Choi et al. (2015) estimated citrus fruit count based on machine vision and image processing algorithms to predict fruit drops due to citrus greening. Kurtulmus et al. (2011) applied ANN to detect and count green citrus fruits on tree. CNN is utilized for measuring the severity of powdery mildew in grape production (Qiu et al., 2022). This system combines the use of a high-resolution camera and machine learning model to process over one thousand samples per day with high accuracy. Li et al. (2017) used Linear Discriminant Analysis (LDA) to detect codling moth (CM) infestation in apples. LDA is another example of a machine learning classification technique. Other machine learning models, such as the generalized linear model with elastic net regularization, were used to classify root rot resistance in lentil plants (Marzougui et al., 2020).
Finally, Hu and You (2023) presented an machine learning-based control framework for energy management in protected structures. This novel framework predicts indoor climate and crop states, optimizing input needs such as irrigation and fertilization. The system was demonstrated in tomato production, achieving an average production cost reduction of 46%.
4. Economic impact and challenges
Many studies have evaluated the economic impact of mechanization and automation in production, but the results vary widely. Using citrus as an example, studies of mechanical harvesting have shown that a lack of profitability could explain the low adoption of harvesting equipment in Florida orange production. Iwai et al. (2009) estimated that the net present value (NPV) difference of mechanically and manually harvested Florida oranges was 0.36%. NPV is a measure of profitability adjusting for factors such as inflation. Later, Searcy et al., (2012) estimated a 17% increase of net returns from mechanically harvesting Florida oranges. In terms of efficiency of mechanical harvesting, Moseley et al., (2012) found that, in terms of annual yield, there were no statistically significant differences between oranges harvested mechanically and those harvested manually. This suggests that mechanical harvesting can match the productivity levels of human labor in certain contexts.
Moreover, the economic impact is dependent on factors such as the size of the production site. Gallardo and Brady (2015) found that larger apple operations and growers of patented apple cultivars were more likely to use labor-enhancing technologies. Matese et al. (2015) conducted a feasibility study on remote sensing platforms for viticulture. The research indicates that for small-scale agricultural operations, specifically those under five hectares (approximately 12 acres), the adoption of UAS platforms presents a more cost-effective solution compared to their larger counterparts. This heightened profitability is attributed to the lower operational and equipment costs of UAS, which are particularly well-suited to the precision requirements and financial constraints of smaller acreages. In contrast, larger farms, with their expansive fields, derive greater economic benefits from utilizing manned aircraft and satellites. These traditional methods offer broader coverage and are more efficient in surveying and managing extensive agricultural lands, despite higher operational costs.
In addition, advancements in mechanization and automation will not only result in improvement of production efficiency, but also will facilitate the transition of farm workers from physical to skill-based roles, requiring new competencies to operate advanced systems. In fact, findings from the National Agricultural Workers Survey indicate that this transformation has already begun. The report found that 41% of farmworkers were primarily performing harvest tasks during the period of 1989 to 1991. This fell to 21% in 2019 to 2020 (U.S. Department of Labor, 2022). Technical tasks including operating farm equipment had replaced hand labor, becoming the primary job of farmworkers. It is also interesting to note the wage differences reported by the National Agricultural Workers Survey. For nonsupervisory farm occupations, equipment operators receive the highest hourly pay at $15.36, whereas graders and sorters receive a lower hourly pay around $14.09. This finding may suggest that mechanization has increased labor productivity and thus improved the wages of technically skilled farmworkers, which aligns with the theory of skill-biased technological change (SBTC) (Battisti et al., 2022). As mechanization enhances overall productivity, it elevates the demand for skilled labor. This underscores that technological progress not only transforms agricultural practices but also incentivizes the workforce to acquire and develop technical skills, leading to structural changes in labor demand and wage dynamics within the agricultural sector.
The adoption and real applications of these advanced technologies, however, are limited and face significant hurdles. Studies by Bac et al. (2014) and Defterli et al. (2016) highlight that, although commercially available robotic harvesters show potential, they currently fall short in replicating the perception, dexterity, and speed of human workers at a competitive cost. Another significant limitation has been identified in the deployment of agricultural robots; most are currently designed to operate exclusively within controlled environments, such as greenhouses or farms with specially designed infrastructure (Defterli et al., 2016). For example, to work in open field production of strawberries, automated harvesters require precision bed shaping to establish the basis for navigation for subsequent operations (Defterli et al., 2016). Also, autonomous robots need to be designed to accommodate uneven or rough terrain, as well as sandy or wet surfaces in an open setting (Defterli et al., 2016). Moreover, the planning of orchard and tree structure also impacts the performance of machinery. Wright (2005) conducted a break-even analysis of overhead mechanical harvesters for cherry producers and found that it would be difficult for Michigan growers to profitably incorporate shaker-harvest machinery, as it could lead to tree damage such as that seen in citrus.
While machine learning systems are increasingly applied to fruit recognition and disease detection, their integration with production operations â such as harvesting, sorting, and crop condition forecasting â remains limited. One of the key challenges is that many current models are crop-specific and struggle to generalize across diverse farming environments and crop types (Isingizwe and Opara, 2020; Sharma et al., 2021). Moreover, the data infrastructure needed to train AI models is often lacking in specialty crop farming, which depends on smaller datasets that vary by region and crop. This contrasts with row crops, where standardized practices make data collection more straightforward (Caplan et al., 2014). Collaboration between growers, researchers, and technology developers is essential to create data-sharing frameworks that facilitate model training and performance improvement. More importantly, the operation and handling of these technologies need to be user-friendly for daily operations and maintenance (Defterli et al., 2016).
Finally, the high fixed costs associated with purchasing and integrating new technologies serve as a significant barrier to entry for many producers, particularly those running smaller-scale operations. This financial challenge contributes to the trend of larger agricultural operations and the exit of smaller ones. Making these technologies more accessible through financial support or incentives could encourage wider adoption. Recognizing these roadblocks, USDA-NIFA has prioritized investments in specialty crops â where private sector underinvestment is more common â by promoting automation and mechanization through programs such as the Agriculture Advanced Research and Development Authority (Astill et al., 2020). Policymakers could further support adoption by offering subsidies, tax credits, or grants to offset costs or by prioritizing public funding for field trials to develop practical, scalable platforms. Overcoming these challenges and improving efficiency for field production remain top priorities for researchers.
5. Going forward
Technological advancements will undoubtedly play a crucial role in the economic sustainability of the specialty crop industry, offering solutions to critical challenges such as reduced labor availability and rising input costs. These technological advancements could efficiently decrease labor hours required for production and marketing, shaping the future of agriculture into a data-driven, autonomous industry that connects intelligent systems (Lezoche et al., 2020).
This article examines recent technological advancements in the specialty crop industry, focusing on innovations in robotics, remote sensing, and machine learning systems, highlighting their potential and discussing challenges that need to be addressed to facilitate widespread adoption. Through the process, several notable research gaps are identified to guide future research.
First, due to the diversity of specialty crops, variations in cultivation and management require tailored technological solutions. While most research focuses on high-value crops such as tomatoes, strawberries and citrus fruits, other specialty crops â such as leafy greens, floriculture, and ornamental crops â are often overlooked despite their need for labor-intensive tasks like pruning and harvesting. Developing flexible adjustments should be considered to accommodate the variability in crop production.
Current studies often explore these technologies in isolation, with limited efforts integrating robotics, remote sensing, and data-based decision-making systems with specialty crop production. Ensuring compatibility among different systems is vital for increasing efficiency. For instance, harvesting and scouting robotics, remote sensing, and machine learning systems need to be integrated to enhance collaboration. However, it is important to note that many system developers may attempt to monopolize their technology by making it incompatible with other systems (Choi, 1994; Mariñoso, 2003). This practice can hinder integration efforts and limit the potential for technological integration in agriculture.
Few economic studies in the current literature explicitly address the distributional effects of technology adoption in specialty crops. Most research has focused on productivity gains and overcoming adoption barriers â such as high costs and labor shortages â while paying less attention to how these technologies reshape income distribution, labor dynamics, and farm structures. Schmitz and Secklerâs (1970) study of the mechanical tomato harvester illustrates such social consequences of mechanization, where gains in efficiency came at the cost of worker displacement. In the AI era, these concerns become even more urgent, as smart technologies require minimal human interaction, raising important questions about how to balance efficiency with social impact, especially in sectors characterized by high labor demands and small-scale operations. The accelerating development and adoption of AI technologies underscore the need for forward-looking policymaking to address the social and political implications.
Throughout our economic history, the pursuit of productive efficiency has consistently driven technological advancement. While these advancements offer numerous benefits, they can also lead to challenges, such as short-term job losses. However, such transitions also pave the way for the development of a more skilled and specialized workforce in the long term. In this context, continued dialogue among stakeholders, policymakers, researchers, and the broader public is essential. This collaborative effort is vital for balancing the benefits of technological progress with the preservation of human values, ensuring that technological development proceeds ethically and supports sustainable and inclusive growth.
References
Abdulridha, J., O. Batuman and Y. Ampatzidis. 2019. UAV-based remote sensing technique to detect citrus canker disease utilizing hyperspectral imaging and machine learning. Remote Sensing 11(11): 1373. https://doi.org/10.3390/rs11111373
Abdulridha, J., Y. Ampatzidis, J. Qureshi and P. Roberts. 2020. Laboratory and UAV-based identification and classification of tomato yellow leaf curl, bacterial spot and target spot diseases in tomato utilizing hyperspectral imaging and machine learning. Remote Sensing 12(17): 2732. https://doi.org/10.3390/rs12172732
Ampatzidis, Y., V. Partel and L. Costa. 2020. Agroview: cloud-based application to process, analyze and visualize UAV-collected data for precision agriculture applications utilizing artificial intelligence. Computers and Electronics in Agriculture 174: 105457.
Anjom, F.K. and S.G. Vougioukas. 2019. Online prediction of tray-transport request time using mechanistic grey box models for improved scheduling of robotic strawberry harvest-aids. Biosystems Engineering 188: 265â287. https://doi.org/10.1016/j.biosystemseng.2019.10.025
Anjom, F.K., S.G. Vougioukas and D.C. Slaughter. 2018. Development of a linear mixed model to predict the picking time in strawberry harvesting processes. Biosystems Engineering 166: 76â89. https://doi.org/10.1016/j.biosystemseng.2017.10.006
Astill, G., Perez, A. and S. Thornsbury. 2020. Developing automation and mechanization for specialty crops: a review of US Department of Agriculture programs. Administrative Publication No. AP-082. USDA, Washington, DC.
Bac, C.W., E.J. van Henten, J. Hemming and Y. Edan. 2014. Harvesting robots for high-value crops: state-of-the-art review and challenges ahead. Journal of Field Robotics 31(6): 888â911. https://doi.org/10.1002/rob.21525
Battisti, M., Del Gatto, M. and C.F. Parmeter. 2022. Skill-biased technical change and labor market inefficiency. Journal of Economic Dynamics and Control 13: 104428.
Bellvert, J., K. Adeline, S. Baram, L. Pierce, B.L. Sanden and D.R. Smart. 2018. Monitoring crop evapotranspiration and crop coefficients over an almond and pistachio orchard throughout remote sensing. Remote Sensing 10: 12. https://doi.org/10.3390/rs10122001
Boatswain Jacques, A.A., V.I. Adamchuk, J. Park, G. Cloutier, J.J. Clark and C. Miller. 2021. Towards a machine vision-based yield monitor for the counting and quality mapping of shallots. Frontiers in Robotics and AI 8: 627067.
Botterill, T., S. Paulin, R. Green, S. Williams, J. Lin, V. Saxton, S. Mills, X. Chen and S. Corbett-Davies. 2017. A robot system for pruning grape vines. Journal of Field Robotics 34(6): 1100â1122. https://doi.org/10.1002/rob.21680
Calvin, L., P. Martin and S. Simnitt. 2022. Adjusting to higher labor costs in selected U.S. fresh fruit and vegetable industries. Available online at http://www.ers.usda.gov/publications/pub-details/?pubid=104217
Camino, C., P.J. Zarco-Tejada and V. Gonzalez-Dugo. 2018. Effects of heterogeneity within tree crowns on airborne-quantified SIF and the CWSI as indicators of water stress in the context of precision agriculture. Remote Sensing 10: 4. https://doi.org/10.3390/rs10040604
Caplan, S., B. Tilt, G. Hoheisel and T.A. Baugher. 2014. Specialty crop growersâ perspectives on adopting new technologies. HortTechnology 24(1): 81â87. https://doi.org/10.21273/HORTTECH.24.1.81
Castillo, M., S. Simnitt, G. Astill and T. Minor. 2021. Examining the growth in seasonal agricultural H-2A labor. Available online at http://www.ers.usda.gov/publications/pub-details/?pubid=102014
Charlton, D., J.E. Taylor, S. Vougioukas and Z. Rutledge. 2019. Agricultural and applied economics association innovations for a shrinking agricultural workforce. Choices 34(2): 1â8. https://doi.org/10.2307/26785766
Chen, B., Y. Jin and P. Brown. 2019. An enhanced bloom index for quantifying floral phenology using multi-scale remote sensing observations. Journal of Photogrammetry and Remote Sensing 156: 108â120. https://doi.org/10.1016/j.isprsjprs.2019.08.006
Cheng, T., D. Riaño and S.L. Ustin. 2014. Detecting diurnal and seasonal variation in canopy water content of nut tree orchards from airborne imaging spectroscopy data using continuous wavelet analysis. Remote Sensing of Environment 143: 39â53. https://doi.org/10.1016/j.rse.2013.11.018
Choi, D., W.S. Lee, R. Ehsani and F.M. Roka. 2015. A machine vision system for quantification of citrus fruit dropped on the ground under the canopy. American Society of Agricultural and Biological Engineers 58(4): 933â946.
Choi, J.P. 1994. Network Externality, Compatibility Choice and Planned Obsolescence. The Journal of Industrial Economics 42(2): 167â182. https://doi.org/10.2307/2950488
Cui, X., Z. Guan, K. L. Morgan, K.-M. Huang and A.M. Hammami. 2022. Multitiered fresh produce supply chain: The case of tomatoes. Horticulturae 8: 12. https://doi.org/10.3390/horticulturae8121204
Dammer, K.-H. 2016. Real-time variable-rate herbicide application for weed control in carrots. Weed Research 56(3): 237â246. https://doi.org/10.1111/wre.12205
Defterli, S.G., Y. Shi, Y. Xu and R. Ehsani. 2016. Review of robotic technology for strawberry production. Applied Engineering in Agriculture 32(3): 301â318. https://doi.org/10.13031/AEA.32.11318
Feldmann, M.J., M.A. Hardigan, R.A. Famula, C.M. Lopez, A. Tabb, G.S. Cole and S.J. Knapp. 2020. Multi-dimensional machine learning approaches for fruit shape phenotyping in strawberry. GigaScience 9(5): giaa030.
Feng, Q., W. Zou, P. Fan, C. Zhang and X. Wang. 2018. Design and test of robotic harvesting system for cherry tomato. International Journal of Agricultural and Biological Engineering 11: 1. https://doi.org/10.25165/ijabe.v11i1.2853
Gallardo, R.K. and M.P. Brady. 2015. Adoption of labor-enhancing technologies by specialty crop producers: The case of the Washington apple industry. Agricultural Finance Review 75(4): 514â532. https://doi.org/10.1108/AFR-05-2015-0022
Gallardo, R.K., K. Grant, D. J. Brown, J.R. McFerson, K.M. Lewis, T. Einhorn and M.M. Sazo. 2019. Perceptions of precision agriculture technologies in the U.S. fresh apple industry. HortTechnology 29(2): 151â162. https://doi.org/10.21273/HORTTECH04214-18
Gobor, Z., G. Froehlich and J. Portner. 2013. Automated attachment of supporting wires in high trellis of hops-initial investigation and study of performance of an advanced prototype. Applied Engineering in Agriculture 29(1): 11â16.
Gongal, A., S. Amatya, M. Karkee, Q. Zhang and K. Lewis. 2015. Sensors and systems for fruit detection and localization: a review. Computers and Electronics in Agriculture 116: 8â19. https://doi.org/10.1016/J.COMPAG.2015.05.021
González-Dugo, V., P. Zarco-Tejada, J. A. J. Berni, L. Suárez, D. Goldhamer and E. Fereres. 2012. Almond tree canopy temperature reveals intra-crown variability that is water stress-dependent. Agricultural and Forest Meteorology 154â155: 156â165. https://doi.org/10.1007/s00271-014-0447-z
González-Dugo, V., Goldhamer, D., Zarco-Tejada, P.J. and E. Fereres. 2015. Improving the precision of irrigation in a pistachio farm using an unmanned airborne thermal system. Irrigation Science 33: 43â52.
Guan, Z., F. Wu, F. Roka and A. Whidden. 2015. Agricultural labor and immigration reform. Choices 30(4): 61.
Guan, Z., F. Wu and A. Whidden. 2020. Florida strawberry production costs and trends. FE1013. Available online at https://edis.ifas.ufl.edu
Haggag, M., S. Abdelhay, A. Mecheter, S. Gowid, F. Musharavati and S. Ghani. 2019. An intelligent hybrid experimental-based deep learning algorithm for tomato-sorting controllers. IEEE Access 7: 106890â106898. https://doi.org/10.1109/ACCESS.2019.2932730
Herrmann, I., E. Bdolach, Y. Montekyo, S. Rachmilevitch, P. A. Townsend and A. Karnieli. 2020. Assessment of maize yield and phenology by drone-mounted superspectral camera. Precision Agriculture 21(1): 51â76. https://doi.org/10.1007/s11119-019-09659-5
Hu, G. and F. You. 2023. An AI framework integrating physics-informed neural network with predictive control for energy-efficient food production in the built environment. Applied Energy 348: 121450. https://doi.org/10.1016/j.apenergy.2023.121450
Huang, K.-M., D. Farnsworth, Z. Guan and Y. Li. 2024. E-Verify and its implications for U.S. agriculture. Choices 39(Quarter 1). Available online at https://www.choicesmagazine.org/choices-magazine/submitted-articles/e-verify-and-its-implications-for-us-agriculture
Huang, K.-M., Z. Guan and A. Hammami. 2022. The U.S. fresh fruit and vegetable industry: An overview of production and trade. Agriculture 12(10): 1719. https://doi.org/10.3390/AGRICULTURE12101719
Huang, Y.-P., T.-H. Wang and H. Basanta. 2020. Using fuzzy mask R-CNN model to automatically identify tomato ripeness. IEEE Access 8: 207672â207682. https://doi.org/10.1109/ACCESS.2020.3038184
Hunt, E. R. and C. S. T. Daughtry. 2018. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? International Journal of Remote Sensing 39(15â16): 5345â5376. https://doi.org/10.1080/01431161.2017.1410300
Hussain, M., L. He, J. Schupp and P. Heinemann. 2022. Green fruit removal dynamics for development of robotic green fruit thinning end-effector. Journal of the American Society of Agricultural and Biological Engineers 65(4): 779â788. https://doi.org/10.13031/ja.14974
Iwai, N., R.D. Emerson and F.M. Roka. 2009. Labor cost and value of citrus operations with alternative technology: Enterprise DCF approach. Southern Agricultural Economics Association (SAEA) annual meeting, Atlanta, GA, 31 Januaryâ3 February 2009. https://doi.org/10.22004/ag.econ.46836
Jafarbiglu, H. and A. Pourreza. 2022. A comprehensive review of remote sensing platforms, sensors and applications in nut crops. Computers and Electronics in Agriculture 197: 106844. https://doi.org/10.1016/J.COMPAG.2022.106844
Kalischuk, M., M.L. Paret, J.H. Freeman, D. Raj, S. Da Silva, S. Eubanks, D.J. Wiggins, M. Lollar, J.J. Marois, H.C. Mellinger and J. Das. 2019. An improved crop scouting technique incorporating unmanned aerial vehicleâassisted multispectral crop imaging into conventional scouting practice for gummy stem blight in watermelon. Plant Disease 103(7): 1642â1650.
Keating, E.G., J. Kerman and D. Arthur. 2022. A note on estimating the relative costs of unmanned aerial systems. Defence and Peace Economics 33(4): 496â500. https://doi.org/10.1080/10242694.2021.1969187
Kitamura, S. and K. Oka. 2005. Recognition and cutting system of sweet pepper for picking robot in greenhouse horticulture. In: IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 2005, pp. 1807â1812. https://doi.org/10.1109/ICMA.2005.1626834
Kumar, P., R.L. Eriksen, I. Simko and B. Mou. 2021. Molecular mapping of water-stress responsive genomic loci in lettuce(Lactuca spp.) using kinetics chlorophyll fluorescence, hyperspectral imaging and machine learning. Frontiers in Genetics 12. https://doi.org/10.3389/fgene.2021.634554
Kurtulmus, F., W.S. Lee and A. Vardar. 2014. Immature peach detection in colour images acquired in natural illumination conditions using statistical classifiers and neural network. Precision Agriculture 15(1): 57â79. https://doi.org/10.1007/s11119-013-9323-8
Lezoche, M., H. Panetto, J. Kacprzyk, J.E. Hernandez and M.M.E. Alemany DÃaz. 2020. Agri-food 4.0: A survey of the supply chains and technologies for the future agriculture. Computers in Industry 117. https://doi.org/10.1016/J.COMPIND.2020.103187
Li, H., W.S. Lee, K. Wang, R. Ehsani and C. Yang. 2014. âExtended spectral angle mapping(ESAM)â for citrus greening disease detection using airborne hyperspectral imaging. Precision Agriculture 15(2): 162â183. https://doi.org/10.1007/s11119-013-9325-6
Li, M., N. Ekramirad, A. Rady and A. Adedeji. 2018. Application of acoustic emission and machine learning to detect codling moth infested apples. Transactions of the American Society of Agricultural and Biological Engineers 6(3): 1157â1164. https://doi.org/10.13031/trans.12548
Li, X., W.S. Lee, M. Li, R. Ehsani, A.R. Mishra, C. Yang and R.L. Mangan. 2015. Feasibility study on Huanglongbing(citrus greening) detection based on WorldView-2 satellite imagery. Biosystems Engineering 132: 28â38. https://doi.org/10.1016/j.biosystemseng.2015.01.009
Liberati, A., D.G. Altman, J. Tetzlaff, C. Mulrow, P.C. Gøtzsche, J.P. Ioannidis, M. Clarke, P.J. Devereaux, J. Kleijnen and D., Moher. 2009. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: explanation and elaboration. Annals of Internal Medicine 151(4): W-65.
López-Granados, F., J. Torres-Sánchez, F.M. Jiménez-Brenes, O. Arquero, M. Lovera and A.I. de Castro. 2019. An efficient RGB-UAV-based platform for field almond tree phenotyping: 3-D architecture and flowering traits. Plant Methods 15(1): 160. https://doi.org/10.1186/s13007-019-0547-0
Lyons, D.J., P. Heinemann, J. Schupp, T.A. Baugher and J. Liu. 2015. Development of a selective automated blossom thinning system for peaches. Transactions of the American Society of Agricultural and Biological Engineers 58(6): 1447â1457. https://doi.org/10.13031/trans.58.11138
Mariñoso, B.G., 2001. Technological incompatibility, endogenous switching costs and lockâin. The Journal of Industrial Economics 49(3): 298.
Marzougui, A., Y. Ma, R.J. McGee, L.R. Khot and S. Sankaran. 2020. Generalized linear model with elastic net regularization and convolutional neural network for evaluating aphanomyces root rot severity in lentil. Plant Phenomics: 2393062. https://doi.org/10.34133/2020/2393062
Maskey, M.L., T.B. Pathak and S.K. Dara. 2019. Weather based strawberry yield forecasts at field scale using statistical and machine learning models. Atmosphere 10: 7. https://doi.org/10.3390/atmos10070378
Matese, A., P. Toscano, S.F. Di Gennaro, L. Genesio, F.P. Vaccari, J. Primicerio, C. Belli, A. Zaldei, R. Bianconi and B. Gioli. 2015. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sensing 7(3): Article 3. https://doi.org/10.3390/rs70302971
McCool, C., J. Beattie, J. Firn, C. Lehnert, J. Kulk, O. Bawden, R. Russell and T. Perez. 2018. Efficacy of mechanical weeding tools: A study into alternative weed management strategies enabled by robotics. Institute of Electrical and Electronics Engineers Robotics and Automation Letters 3(2): 1184â1190. https://doi.org/10.1109/LRA.2018.2794619
Medeiros, H., D. Kim, J. Sun, H. Seshadri, S. A. Akbar, N.M. Elfiky and J. Park. 2017. Modeling dormant fruit trees for agricultural automation. Journal of Field Robotics 34(7): 1203â1224.
Menendez-Aponte, P., X. Kong and Y. Xu. 2019. An approximated, control affine model for a strawberry field scouting robot considering wheelâterrain interaction. Robotica 37(9): 1545â1561. https://doi.org/10.1017/S0263574719000134
Moghimi, A., A. Pourreza, G. Zuniga-Ramirez, L.E. Williams and M.W. Fidelibus. 2020. A novel machine learning approach to estimate grapevine leaf nitrogen concentration using aerial multispectral imagery. Remote Sensing 12: 21. https://doi.org/10.3390/rs12213515
Moseley, K.R., L. House and F.M. Roka. 2012. Adoption of mechanical harvesting for sweet orange trees in Florida: Addressing grower concerns on long-term impacts. International Food and Agribusiness Management Review 15(2): 83â98. https://doi.org/10.22004/ag.econ.127108
Ni, X., F. Takeda, H. Jiang, W.Q. Yang, S. Saito and C. Li. 2022. A deep learning-based web application for segmentation and quantification of blueberry internal bruising. Computers and Electronics in Agriculture 201: 107200. https://doi.org/10.1016/j.compag.2022.107200
Nturambirwe, J.F.I. and U.L. Opara. 2020. Machine learning applications to non-destructive defect detection in horticultural products. Biosystems Engineering 189: 60â83. https://doi.org/10.1016/j.biosystemseng.2019.11.011
Oberti, R., M. Marchi, P. Tirelli, A. Calcante, M. Iriti and A.N. Borghese. 2014. Automatic detection of powdery mildew on grapevine leaves by image analysis: Optimal view-angle range to increase the sensitivity. Computers and Electronics in Agriculture 104: 1â8.
Osco, L.P., A.P.M. Ramos, D.R. Pereira, E.A.S. Moriya, N.N. Imai, E.T. Matsubara, N. Estrabis, M. de Souza, J.M. Junior, W.N. Gonçalves, J. Li, V. Liesenberg and J.E. Creste. 2019. Predicting canopy nitrogen content in citrus-trees using random forest algorithm associated to spectral vegetation indices from UAV-imagery. Remote Sensing 11(24): 2925. https://doi.org/10.3390/rs11242925
Pantazi, X. E., D. Moshou, T. Alexandridis, R. L. Whetton and A. M. Mouazen. 2016. Wheat yield prediction using machine learning and advanced sensing techniques. Computers and Electronics in Agriculture 121: 57â65. https://doi.org/10.1016/j.compag.2015.11.018
Pantelidakis, M., A.A. Panagopoulos, K. Mykoniatis, S. Ashkan, R. Cherupillil Eravi, V. Pamula, E. Cruz Verduzco III, O. Babich, O.P. Panagopoulos and G. Chalkiadakis. 2022. Identifying sunlit leaves using convolutional neural networks: an expert system for measuring the crop water stress index of pistachio trees. Expert Systems with Applications 209: 118326. https://doi.org/10.1016/j.eswa.2022.118326
Partel, V., L. Nunes, P. Stansly and Y. Ampatzidis. 2019. Automated vision-based system for monitoring Asian citrus psyllid in orchards utilizing artificial intelligence. Computers and Electronics in Agriculture 162: 328â336. https://doi.org/10.1016/J.COMPAG.2019.04.022
Peng, C., S. Vougioukas, D. Slaughter, Z. Fei and R. Arikapudi. 2022. A strawberry harvest-aiding system with crop-transport collaborative robots: Design, development and field evaluation. Journal of Field Robotics 39(8): 1231â1257. https://doi.org/10.1002/rob.22106
Pérez-Ruiz, M., D.C. Slaughter, C.J. Gliever and S.K. Upadhyaya. 2012. Automatic GPS-based intra-row weed knife control system for transplanted row crops. Computers and Electronics in Agriculture 80: 41â49. https://doi.org/10.1016/j.compag.2011.10.006
Qiu, T., A. Underhill, S. Sapkota, L. Cadle-Davidson and Y. Jiang. 2022. High throughput saliency-based quantification of grape powdery mildew at the microscopic level for disease resistance breeding. Horticulture Research 9: uhac187. https://doi.org/10.1093/hr/uhac187
Raja, R., D.C. Slaughter, S.A. Fennimore, T.T. Nguyen, V.L. Vuong, N. Sinha, L. Tourte, R.F. Smith and M.C. Siemens. 2019. Crop signalling: a novel crop recognition technique for robotic weed control. Biosystems Engineering 187: 278â291. https://doi.org/10.1016/J.BIOSYSTEMSENG.2019.09.011
Raja, R., T.T. Nguyen, V.L. Vuong, D.C. Slaughter and S.A. Fennimore. 2020a. RTD-SEPs: Real-time detection of stem emerging points and classification of crop-weed for robotic weed control in producing tomato. Biosystems Engineering 195: 152â171. https://doi.org/10.1016/j.biosystemseng.2020.05.004
Raja, R., T.T. Nguyen, D.C. Slaughter and S.A. Fennimore. 2020b. Real-time weed-crop classification and localisation technique for robotic weed control in lettuce. Biosystems Engineering 192: 257â274. https://doi.org/10.1016/j.biosystemseng.2020.02.002
Roka, F.M. and Z. Guan. 2018. Farm labor management trends in Florida, USA â challenges and opportunities. International Journal of Agricultural Management 7(1): 79â87. https://doi.org/10.22004/ag.econ.292479
Sahu, P., A.P. Singh, A. Chug and D. Singh. 2022. A systematic literature review of machine learning techniques deployed in agriculture: a case study of banana crop. IEEE Access 10: 87333â87360. https://doi.org/10.1109/ACCESS.2022.3199926
Sankaran, S., J.M. Maja, S. Buchanon and R. Ehsani. 2013. Huanglongbing (citrus greening) detection using visible, near infrared and thermal imaging techniques. Sensors 13(2): 2. https://doi.org/10.3390/s130202117
Sarig, Y., J.F. Thompson and G.K. Brown. 2000. Alternatives to immigrant labor? Center for Immigration Studies, Washington, DC. Available online at https://cis.org/Report/Alternatives-Immigrant-Labor
Sarri, D., S. Lombardo, R. Lisci, V. De Pascale and M. Vieri. 2020. AgroBot Smash a robotic platform for the sustainable precision agriculture. Lecture Notes in Civil Engineering 67: 793â801. https://doi.org/10.1007/978-3-030-39299-4_85
Schmitz, A. and D. Seckler. 1970. Mechanized agriculture and social welfare: The case of the tomato harvester. American Journal of Agricultural Economics 52(4): 569â577.
Searcy, J., F.M. Roka and T.H. Spreen. 2012. The impact of mechanical citrus harvester adoption on Florida orange juice growers. Agricultural and Applied Economics Association (AAEA) annual meeting, Seattle, WA, 12-14 August 2012. https://doi.org/10.22004/ag.econ.124711
Seyyedhasani, H., C. Peng, W.J. Jang and S.G. Vougioukas. 2020a. Collaboration of human pickers and crop-transporting robots during harvesting â Part II: Simulator evaluation and robot-scheduling case-study. Computers and Electronics in Agriculture 172: 105323. https://doi.org/10.1016/J.COMPAG.2020.105323
Seyyedhasani, H., C. Peng, W. Jang and S.G. Vougioukas. 2020b. Collaboration of human pickers and crop-transporting robots during harvesting â Part I: Model and simulator development. Computers and Electronics in Agriculture 172: 105324. https://doi.org/10.1016/j.compag.2020.105324
Sharma, A., A. Jain, P. Gupta and V. Chowdary. 2021. Machine Learning Applications for Precision Agriculture: A Comprehensive Review. IEEE Access 9: 4843â4873. https://doi: 10.1109/ACCESS.2020.3048415
Silwal, A., J.R. Davidson, M. Karkee, C. Mo, Q. Zhang and K. Lewis. 2017. Design, integration and field evaluation of a robotic apple harvester. Journal of Field Robotics 34(6): 1140â1159. https://doi.org/10.1002/rob.21715
Suh, D.H., Z. Guan and H. Khachatryan. 2017. The impact of Mexican competition on the U.S. strawberry industry. International Food and Agribusiness Management Review 20: 1â14. https://doi.org/10.22434/IFAMR2016.0075
United States Department of Agriculture, Agricultural Marketing Service (USDA-AMS). n.d. What is a Specialty Crop? USDA-AMS, Washington, DC. Available online at https://www.ams.usda.gov/services/grants/scbgp/specialty-crop
United States Department of Agriculture, Economic Research Service (USDA-ERS). 2020. Food Availability (Per Capita). USDA-ERS, Washington, DC. Available online at https://www.ers.usda.gov/data-products/food-availability-per-capita-data-system/
United States Department of Agriculture, Economic Research Service (USDA-ERS). 2022. Cash receipts by commodity State ranking. USDA-ERS, Washington, DC. Available online at https://data.ers.usda.gov/reports.aspx?
United States Department of Agriculture, National Agricultural Statistics Service (USDA-NASS). 2022. 2022 Census of Agriculture. USDA-NASS, Washington, DC, USA. Available online at https://www.nass.usda.gov/AgCensus/
United States Department of Labor. 2022. National Agricultural Workers Survey. United States Department of Labor, Washington, DC. Available online at https://www.dol.gov/agencies/eta/national-agricultural-workers-survey
Wright, R.T. 2005. Technological leapfrogging as a source of competitive advantage in the American and Polish tart cherry industries. Masterâs thesis, Michigan State University, East Lansing, MI. https://doi.org/10.22004/ag.econ.10954
Yu, Y., K. Zhang, H. Liu, L. Yang and D. Zhang. 2020. Real-time visual localization of the picking points for a ridge-planting strawberry harvesting robot. IEEE Access 8: 116556â116568. https://doi.org/10.1109/ACCESS.2020.3003034
Zhang, L., G. Gui, A.M. Khattak, M. Wang, W. Gao and J. Jia. 2019. Multi-task cascaded convolutional networks based intelligent fruit detection for designing automated robot. IEEE Access 7: 56028â56038.
Zhang, M., Y. Jiang, C. Li and F. Yang. 2020. Fully convolutional networks for blueberry bruising and calyx segmentation using hyperspectral transmittance imaging. Biosystems Engineering 192: 159â175. https://doi.org/10.1109/ACCESS.2019.2899940
Zhang, Z., Y. Jin, B. Chen and P. Brown. 2019. California almond yield prediction at the orchard level with a machine learning approach. Frontiers in Plant Science 10: 00809. https://doi.org/10.3389/fpls.2019.00809
Zhao, T., B. Stark, Y. Chen, A.L. Ray and D. Doll. 2017. Challenges in water stress quantification using small unmanned aerial system (sUAS): Lessons from a growing season of almond. Journal of Intelligent and Robotic Systems 88(2): 721â735. https://doi.org/10.1007/s10846-10017-0513-x
Zheng, H., L. Chen, X. Han, X. Zhao and Y. Ma. 2009. Classification and regression tree (CART) for analysis of soybean yield variability among fields in Northeast China: The importance of phosphorus application rates under drought conditions. Agriculture, Ecosystems and Environment 132(1): 98â105. https://doi.org/10.1016/j.agee.2009.03.004
Corresponding author





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}